
Zamislite robota koji se ne oslanja na čvrste metalne ruke, već se kreće i prilagođava okolini poput biljke penjačice. Upravo su to razvili istraživači s prestižnih sveučilišta MIT i Stanford – mekani stroj u obliku loze koji je sposoban podići krhke predmete, pa čak i ljudska tijela. Desetljećima je robotika napredovala u snazi i brzini, ali je često zakazivala u jednom ključnom aspektu: nježnom kontaktu sa stvarnim svijetom.
Robot-loza koji mijenja pravila igre
U tvornicama i bolnicama većina se robota i dalje oslanja na krute hvataljke i artikulirane ruke koje dobro funkcioniraju s industrijskim dijelovima, ali ne i s osjetljivim objektima. Novi sustav koji su razvili inženjeri s MIT-a i Stanforda ne “hvata” predmete u klasičnom smislu riječi. Umjesto toga, on se razvija, klizi i omotava oko njih. Ideja nije stiskanje, već obuhvaćanje, što je konceptualna promjena koja otvara vrata primjenama koje su do jučer bile nezamislive.
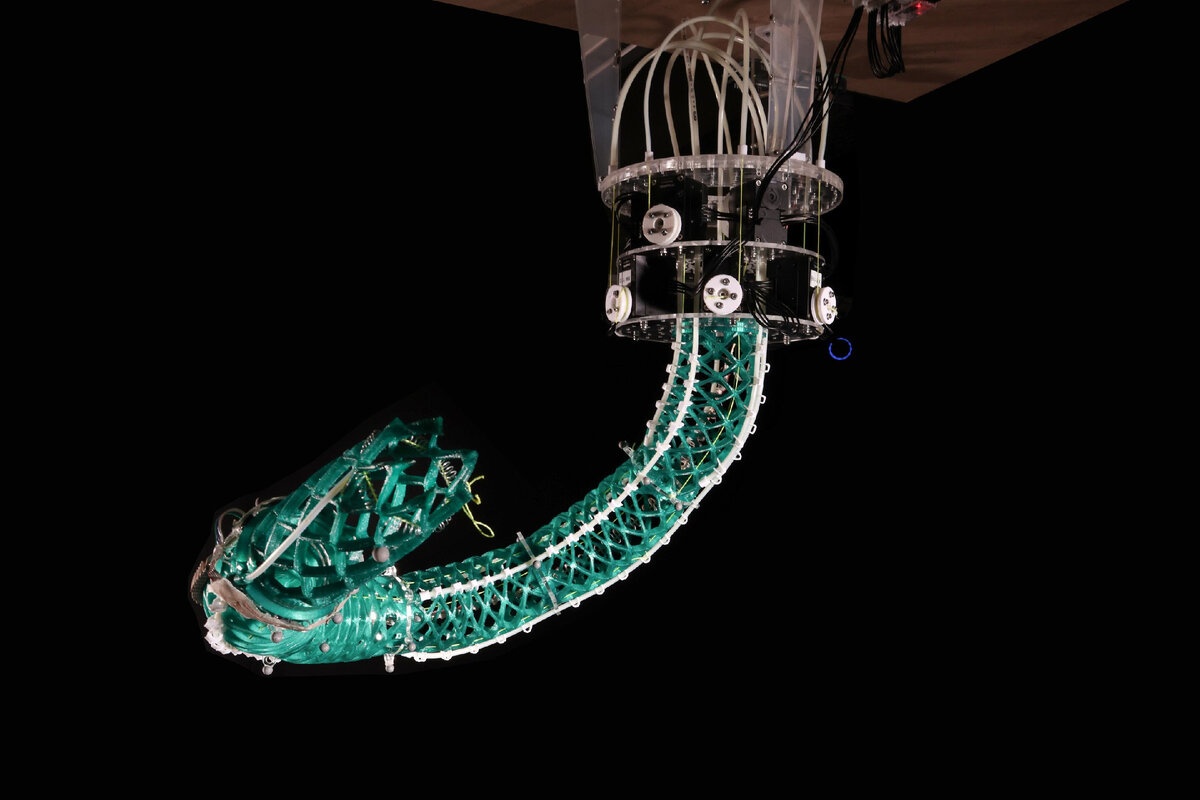
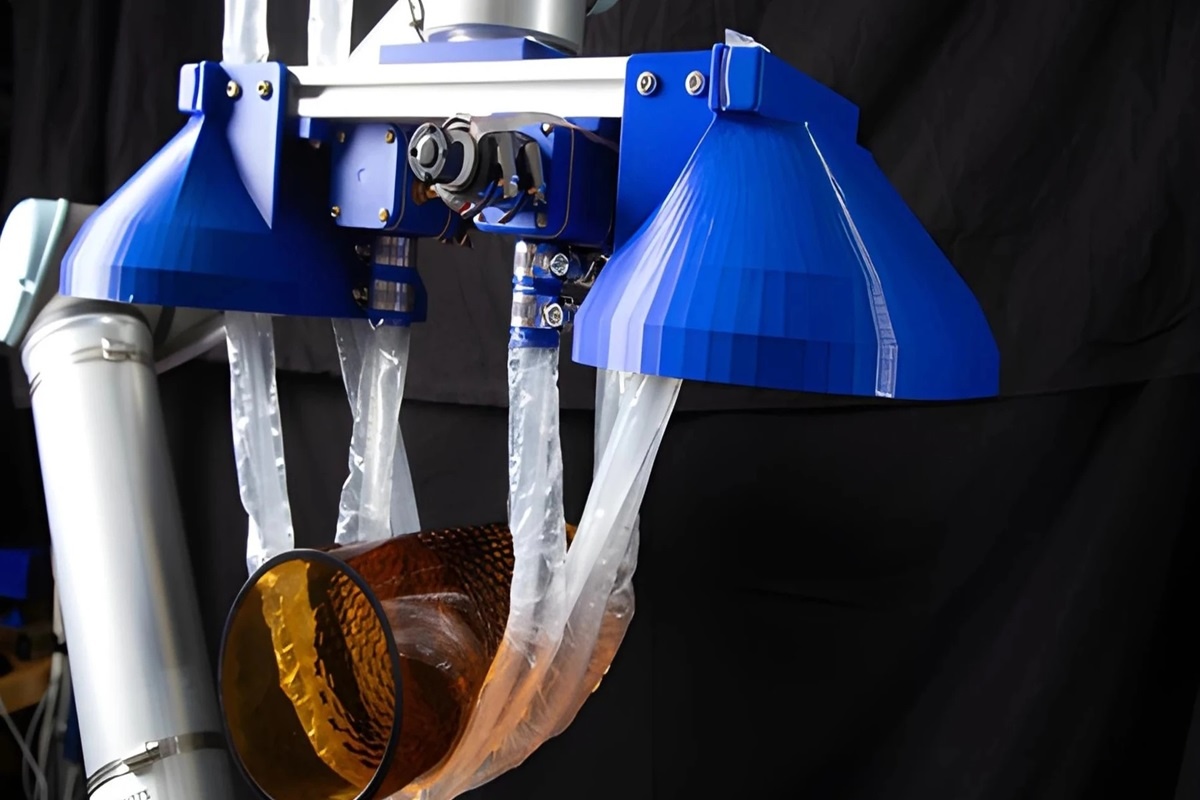
Dizajn se temelji na seriji fleksibilnih pneumatskih cijevi koje izlaze iz kutije pod tlakom postavljene na robotsku ruku. Ove cijevi mogu vijugati ispod ili oko predmeta, čak i u vrlo uskim prostorima. Kada dosegnu drugu stranu, cijevi se ponovno pričvršćuju za ruku, zatvarajući petlju koja omogućuje podizanje ili rotiranje tereta uz veliku stabilnost.
Preciznost inspirirana prirodom
Za razliku od prijašnjih pokušaja razvoja robota inspiriranih biljkama, ovaj sustav može aktivno uvlačiti svoje “vriježe”, omogućujući mu promjenu konfiguracije u trenu. Kako objašnjava Kentaro Barhydt, strojar s MIT-a, čin hvatanja predmeta zapravo je složen proces koji zahtijeva pozicioniranje, okruživanje i osiguravanje. Razdvajanjem tih faza, robot postiže razinu kontrole koja nije uobičajena u konvencionalnoj robotici.

U laboratorijskim testovima tim je pokazao nevjerojatnu svestranost. Robot je uspješno manipulirao raznim predmetima:
- Podizao je okrugle objekte u neurednim okruženjima.
- Držao je staklenu vazu bez opasnosti od pucanja.
- Premještao je teške i nepravilne terete poput lubenica bez oštećenja.
- Sakupljao je više različitih predmeta odjednom.
Budućnost u bolnicama
Pravi potencijal ovog sustava izranja u zdravstvenom sektoru, posebno u bolnicama i centrima za njegu starijih osoba. Trenutačno premještanje pacijenata često zahtijeva njihovo okretanje kako bi se postavila nosiljka, što može biti bolno i stresno za pacijenta, ali i naporno za osoblje. Robot-loza nudi radikalnu alternativu: njegove cijevi mogu skliznuti ispod tijela pacijenta bez potrebe za njegovim podizanjem, ravnomjerno ga obavijajući i smanjujući točke pritiska.
Prema riječima Allison Okamura sa Stanforda, ovaj tip robota predstavlja realističniji i humaniji način fizičke asistencije osobama s ograničenom pokretljivošću. Izvan medicine, dizajn je prilagodljiv za tešku industriju, automatizaciju luka i skladišta – bilo koje okruženje gdje je potrebno rukovati teškim, nepravilnim ili delikatnim teretima uz kombinaciju fleksibilnosti i snage.







